Ok, this is getting a bit too much to handle.
I barely find time to post on the website, I don’t keep up with correspondance. InMoov is taking a bit too much space on my real life.
So please Dear InMoov followers be patient.
So in june we did the Futur en Seine event and we’ve met very interesting people and groups, in fact we have been approached and invited by Dassault Systems, they offer a developpement plateform which could be interesting for InMoov’s futur.
The space at Futur en Seine was extremely loud 🙂 Average 95db and up to 110DB recorded at peaks.
Although I never presented the robot in such a loud place, we did manage an Interview with Clubic.com:
Clubic.com InMoov at Futur en Seine
Here are some pictures of the event on our InMoov Tweeter.
Then we did the First Paris MakerFaire. This was very nice because Alessandro came to Paris with his girlfriend, brother in law and his InMoov robot.
We both had a bit of trouble with our robots, these things happen sometimes. Mine got the mouth servo burned and the Leap Motion hand was out of function.
Alessandro had been printing a lots of parts for his robot with 1 shell setting at 30% infill. And two of his parts delaminated under the arm weight. Fortunatly I could reprint during the night in my workshop and during the day we were surrounded by 3D printers. Thanks to the Fabshop for helping on this.
Alessandro was doing cool demonstrations with kinematic movements and 4 PID eye tracking.
He had made some super T-shirts with the new logo, which we all were very happy to wear. These will be for sale on the InMoov site somewhere in september, if I get some time to organize that.
And above all, we were protected by the Force.
 The force for the appearance
The force for the appearance
 Alessandro, the real Force
Alessandro, the real Force
 The Paris Team
The Paris Team
 InMoov with Sherry Huss, Vice President at Maker Media, Maker-In-Chief at O’Reilly Media
InMoov with Sherry Huss, Vice President at Maker Media, Maker-In-Chief at O’Reilly Media
 InMoov and Berthier Luyt, Le Fabshop, Organizer Makerfaire Paris
InMoov and Berthier Luyt, Le Fabshop, Organizer Makerfaire Paris
During the Makerfaire Paris, Leon and Marten the two guys from Holland that are making the Nervo board came by surprise!!!
I was so amazed to see them suddenly on the booth. Imagine they had to drive 5 hours just to be there for the day and they returned the same night!!
I was glad they could see how the boards and ribbon wires, they had made for me, were finally set up into the robot. By the way these new Nervo boards should be for sale around August for the first batch. We hope so.
They also have been of great help during the day, you can see them testing and interchanging the burned Jaw servo in the video.
I don’t know how this happened but I don’t seem to find pictures of them in my camera but you can see Leon and Marten in the below video made by Vito.
 Header for servos in the head
Header for servos in the head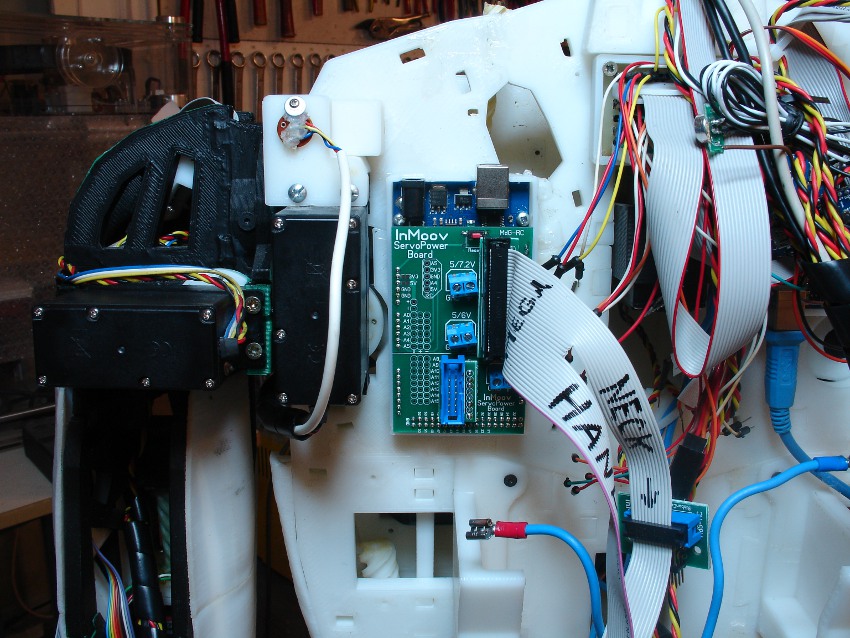 New Nervo Board Version1
New Nervo Board Version1
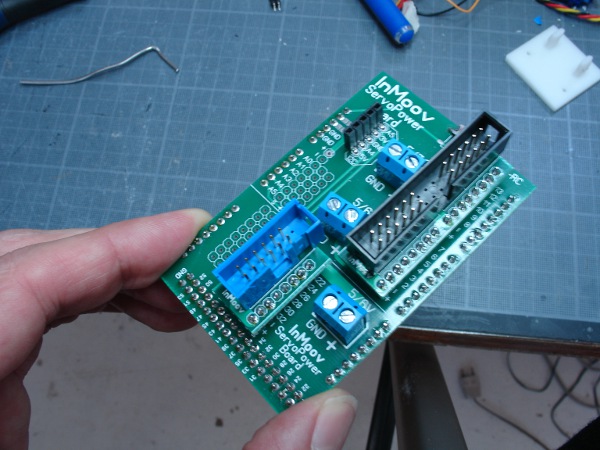 Nervo Board version1 before set up
Nervo Board version1 before set up
A demo video found on Internet:
The video made by Vito, Music by Hu:
One week later, we also went for the Japan expo event, which is a surprising environment. Mangas, books and costumes for everyone. We were invited by the Caliban Association. We had a great time and had the chance to see other Humanoïd robots like Cybedroid and the famous « Robotstudio » with it’s very interesting assembly approach.
The below video is a test we tried to do between Robotstudio and InMoov using recognition gesture and a Kinect. The goal was to give voice commands to InMoov and then let robotstudio, through the kinect, reproduce the gestures. We had to get InMoov some sort of pants for the kinect to correctly detect the body shape. It was interesting but not obvious for the public. See by your self on the video. Sorry for the very bad quality video:
A video made by Gregoire of the Caliban Association:


Many robots at the Japan expo:
As I said a few weeks ago on MyRobotLab shout box,
Here is the release of the Stomach Part, so get your printers warm and ready The tuto isn’t ready and I’m not sure I will have the time to do it before September. We will see how I can manage that.
You can find all the parts for Top Stomach on Cubehero
Tutorial is : Here
You need to print:
1 x DiskInternV3 .stl
1 x TStomSpacerV1.stl
1 x TStomRotFrontV1.stl
1 x TStomRotBackV1.stl
1 x TStomPotHolderv1.stl
1 x TStomCovRightV2.stl
1 x TStomCovLeftV2.stl
1 x TStoServoHolsterV2.stl
1 x TStoPistonRightV2.stl
1 x TStoPistonLeftV2.stl
2 x TStoMiddleV1.stl
1 x TStoFrontStandV1.stl
1 x TStoFrontRightV1.stl
1 x TStoFrontLeftV1.stl
1 x TStoBackStandRightV1.stl
1 x TStoBackStandLeftV1.stl
1 x TStoBackRightV1.stl
1 x TStoBackLeftV1.stl
1 x StomGearV2.stl
1 x StoGearAttachV1.stl
1 x ServoBackV1.stl
1 x RollFrontRightV1.stl
1 x RollFrontLeftV1.stl
1 x RollBackRightV1.stl
1 x RollBackLeftV1.stl
1 x DiskUnderV1.stl
4 x DiskExternV2.stl
You will need 2 servos HS805BB which needs to be hacked. Both motor servos will be using only one servo board and one potentiometer, this way both motors will be synchronised when rotating. This will be explained in the tuto.
You will also need (for the fun) 1 Neo Pixel Ring from Adafruit. As for now I’m using an extra Nano Arduino board to control it, but hopefully this will be implemented into MRL and we will be able to connect it to our Mega board.
In the video below I explain some of the functionality of the stomach parts: